
로봇 손 제어하기
2018-05-08 17:49:01
개요
일반적으로 로봇이라고 생각하면 터미네이터에 나오는 로봇처럼 두발로 걸어다니는 휴머노이드 로봇을 떠올리실 겁니다.
그러나 일반적으로 사용되는 로봇은 제조, 산업용으로 사용하는 로봇 팔입니다. 대표적으로 자동차를 조립하거나 창고에 물건을 운반하는 일을 하는 로봇 팔들이 있습니다.

로봇 팔은 원래 공장에서만 사용 되는 전유물이었지만, 기술이 좋아질 수록 세밀함과 정밀함을 가지게 되어 공장에서만이 아니라 일상 생활에서도 다양하게 사용되고 있습니다.

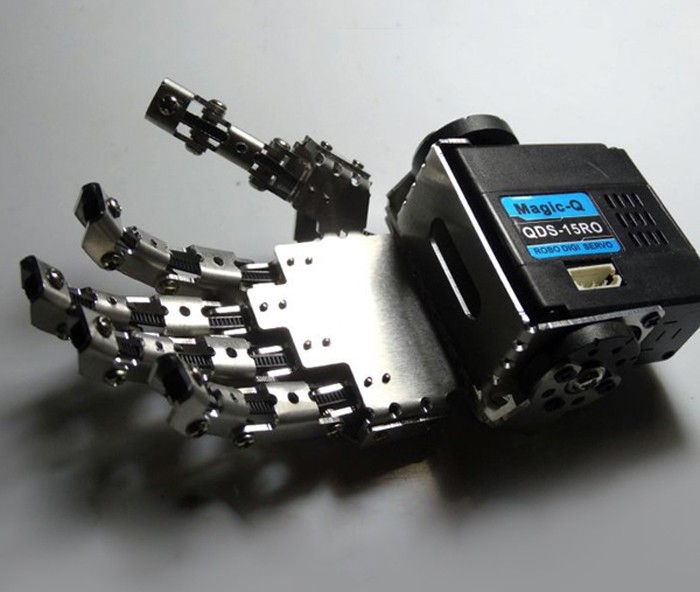
이렇게 일상생활에서 로봇 팔이 사용되면서 아두이노 용으로 가볍게 사용할 수 있는 로봇 팔(손) 이 나왔는데요.
이번 컨텐츠에서는 로봇 손을 오렌지보드에 연결한 후 간단하게 제어해 보겠습니다.
부품 목록
| NO | 부품명 | 수량 | 상세설명 |
| 1 | 오렌지 보드 | 1 | |
| 2 | 로봇 손 | 1 | QDS-1503 |
| 부품명 | 오렌지 보드 | 피에조 부저 |
| 파트 |  |
 |
하드웨어 making
브레드보드
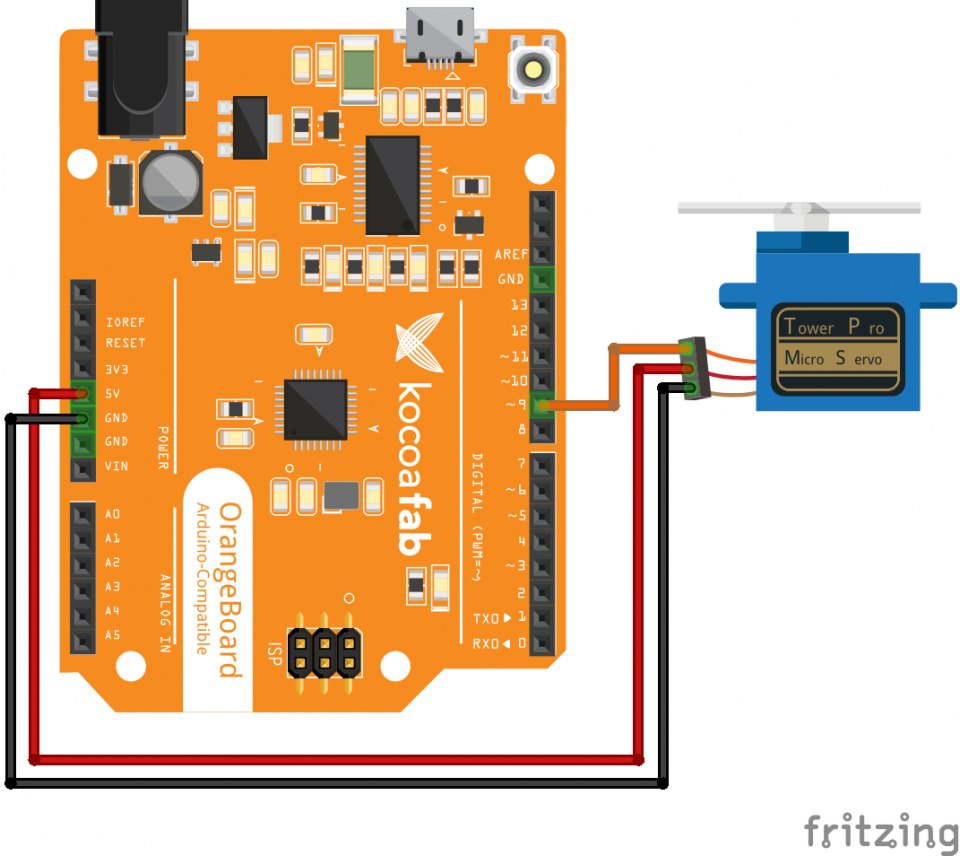

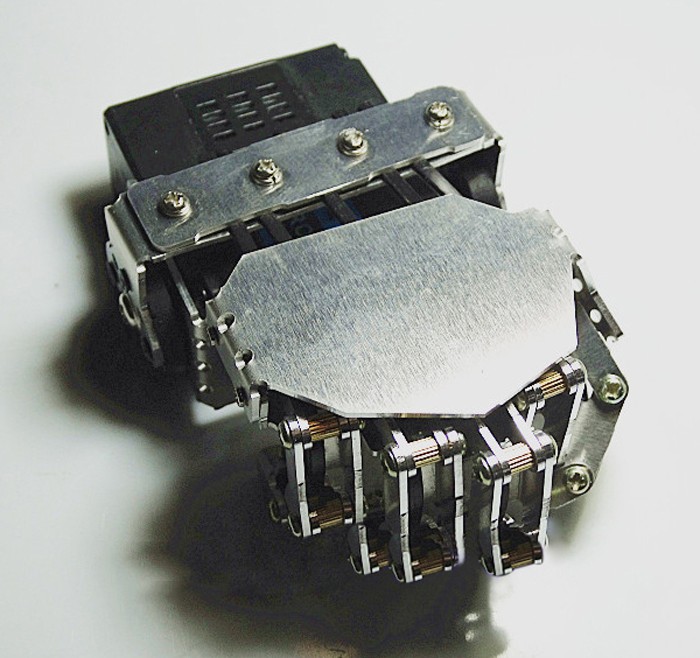
* 로봇 손의 보시면 밑에 검은색 서보모터가 있습니다. 여기에 연결된 케이블을 보시면 흰색, 빨간색, 검은색으로 되어있습니다.
흰색 = D9번핀, 빨간색 = 5V, 검은색 = GND 에 연결해 주시면 됩니다.
소프트웨어 coding
#include <Servo.h>
Servo myservo;
void setup() {
myservo.attach(9); // 로봇 손을 D9번핀에 연결합니다.
}
void loop() {
// 1초마다 로봇 손을 쥐었다 폈다를 반복합니다.
myservo.write(50);
delay(1000);
myservo.write(130);
delay(1000);
}
위 코드는 간단하게 서보모터를 50도 / 130도로 움직이는 코드입니다.
로봇 손은 밑에 있는 서보모터 각도에 따라 손이 오므라들거나 펴집니다. 서보모터 각도에 따라 쥐는 힘이 달라지므로 각도를 다양하게 바꿔가면서 테스트 해보세요.
이번 컨텐츠에서 사용하는 로봇 손은 아쉽게도 손가락을 개별로으로 움직일 수 없습니다. (움직일려면 개조가 필요합니다. )
그 대신 전체적으로 움직이기 때문에 생각보다 쥐는 힘이 매우 강하니 이를 이용해서 물건을 집거나 서보모터를 하나 더 추가하여 물건을 옮기는 프로젝트를 해보실 수 있습니다.





kocoafabeditor 
항상 진취적이고, 새로운 것을 추구하는 코코아팹 에디터입니다!
 로봇 손, 아두이노, 오렌지보드
로봇 손, 아두이노, 오렌지보드
