
minions robot : final
2016-04-04 13:05:20
개요
봄 향기 가득 뿜으며 염소할배가 돌아왔습니다~~~~~~~!!!!!!!!!
제 프로젝트가 아닌 아크릴 램프로 먼저 잠시 나왔었는데요~^^;;;
저번 프로젝트와의 기간이 너무 길었네요~
너무 오래 걸렸죠 ㅠㅠ 모델링부터 도색까지 하다보니 혼자하기엔 힘들었나봅니다.

관련 튜토리얼
- 서보모터란?
필라멘트의 이해를 하고 넘어가셔야 될것같아서 올립니다.
나중에 올려드리겠지만 PLA와 ABS의 후가공방법에 차이가 있다 생각하거든요~^^
부품 목록
| NO. | 부품명 | 수량 | 상세설명 |
| 1 | 오렌지 보드 | 1 | |
| 2 | 서보모터 표준형 | 2 | |
| 3 | 9볼트 어답터 | 1 | (미니일경우 필요 없음) |
| 4 | 철사 | 1 | 30cm |
| 5 | 락카 | 1 | 흰색,파랑,노랑,은색,검정 |
| 부품 명 | 오렌지 보드 | 서보모터 | 9볼트 어답터 | 철사 | 락카 |
| 파트 |  |
 |
 |
 |
 |
소프트웨어 코딩
#include <Servo.h>
Servo myservo1;
Servo myservo2;
int a;
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);
myservo1. attach(9);
myservo2. attach(10);
delay(500);
myservo1. write(90);
myservo2. write(160);
}
void loop() {
// put your main code here, to run repeatedly:
a = random(1, 5);
//a = Serial.read();
Serial.println(a);
if (a == 1) {
//full eyes
Serial.println("1111111111111111");
myservo1. write(90);
myservo2. write(170);
delay(1500);
}
else if (a == 2) {
Serial.println("222222222222");
myservo2. write(10);
delay(100);
myservo2. write(160);
delay(100);
myservo2. write(10);
delay(100);
myservo2. write(160);
delay(100);
myservo2. write(10);
delay(100);
myservo2. write(160);
delay(1500);
}
else if (a == 3)
{
Serial.println("3333333333");
myservo1.write(120);
delay(500);
for (int i = 0; i < 3; i++) {
for (int pos = 120; pos >= 60; pos -= 1) // goes from 180 degrees to 0 degrees
{
myservo1.write(pos); // tell servo to go to position in variable 'pos'
delay(20); // waits 15ms for the servo to reach the position
}
for (int pos = 60; pos <= 120; pos += 1) // goes from 180 degrees to 0 degrees
{
myservo1.write(pos); // tell servo to go to position in variable 'pos'
delay(20); // waits 15ms for the servo to reach the position
}
}
myservo1. write(90);
delay(1500);
}
else if (a == 4) {
Serial.println("4444444444444");
for (int i = 0; i < 3; i++) {
for (int pos = 10; pos <= 160; pos += 1) // goes from 180 degrees to 0 degrees
{
myservo2.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for (int pos = 160; pos >= 10; pos -= 1) // goes from 180 degrees to 0 degrees
{
myservo2.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
delay(1500);
}
else if (a == 5)
{
Serial.println("55555555555");
myservo2.write(170);
delay(500);
for (int pos = 170; pos >= 5; pos -= 1) // goes from 180 degrees to 0 degrees
{
myservo2.write(pos); // tell servo to go to position in variable 'pos'
delay(30); // waits 15ms for the servo to reach the position
}
delay(1500);
}
}
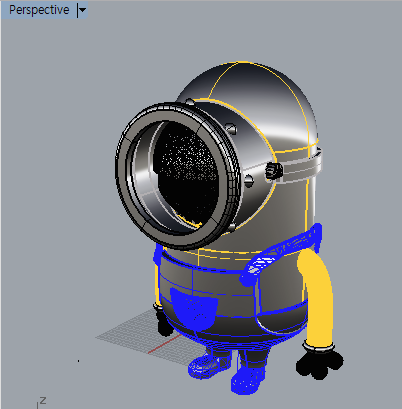
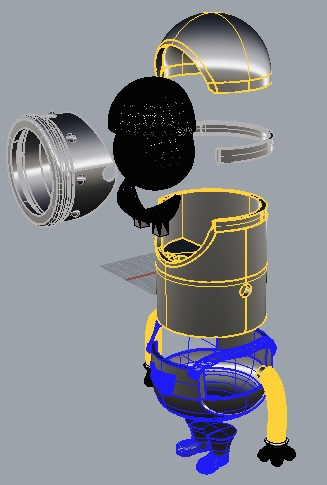
미니언 모델링
저번에 다 보여드리지 못한 모델링과 추가적으로 한 모델링까지 살짝쿵 보여드려요 ~
출력물 및 후가공
-몸통
미니언 키가 크다보니 출력시간도 엄청나네요 (35CM입니다.)
머리쪽이 쭈글쭈글하게 나와서 강제적으로 퍼티작업 들어갔습니다.
* 퍼티 작업시에는 꼭 환기와 마스크 착용하세요


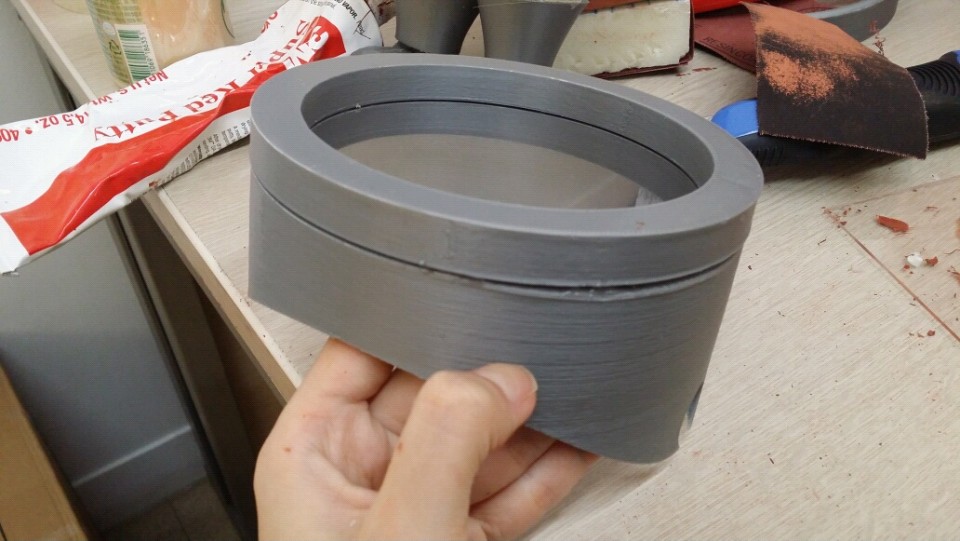
-고글
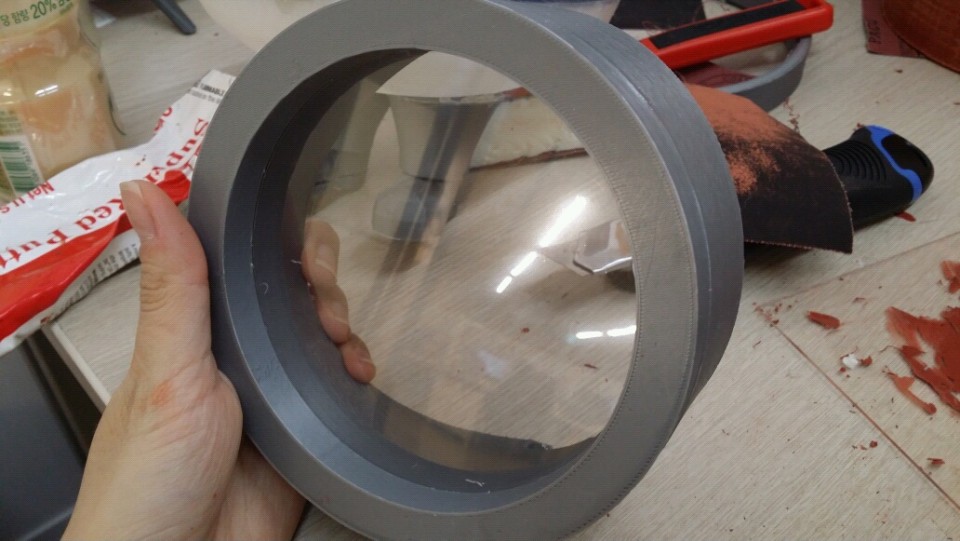
이건 고글이에요~~~ 저기 홈부분에 야크릴을 끼울거에요

아크릴 끼운게 보이시나요???

-하의
바지입니다
바지는 필 중간에 필라멘트가 모자라 저기 흰색부분에서 멈췄어요 ㅠㅠㅠ 그래서 회색부분 따로 뽑아서 붙였습니다.
저는 이런경우 뽑힌 높이를 측정해서 모델링에서 제외하고 뽑고 있어요 혹시 더 좋은 방법있으시면 공유 부탁드립니다.


-다리
다리는 따로 뽑아서 붙였습니다.


오른쪽발이 계속 잘 안나오네요 모델링에 문제가 ㅠㅠ
도색하기
-상체
도색에 쓰인 물품은 락카입니다.
락카는 흰색 , 파랑 , 노랑 , 검정 , 은색 총 5가지가 쓰였습니다.
노락색은 큰것을 사는것을 추천드립니다.
1개 사실경우 필라멘트를 밝은 색을 사용해주시고 레드퍼티를 사용하셨다면, 흰색락카로 먼저 초벌도색후 노란색으로 진행하시면 1개로도 가능하시리라 봅니다.
저는 노랑색으로 바로 시작하다보니 10번정도에 거쳐 힘들게 노랑색이 나왔습니다. ㅠㅠ


위의 사진이 한 9번째입니다. 버리가 맨질맨질해졌네요
무광이여야 보기 좋은데 말이죠 ~~
-하체
바지 도색입니다.
바지 색은 파랑보다 어두운 용담으로 했습니다만 제 생각과는 달리 조금 밝았습니다.



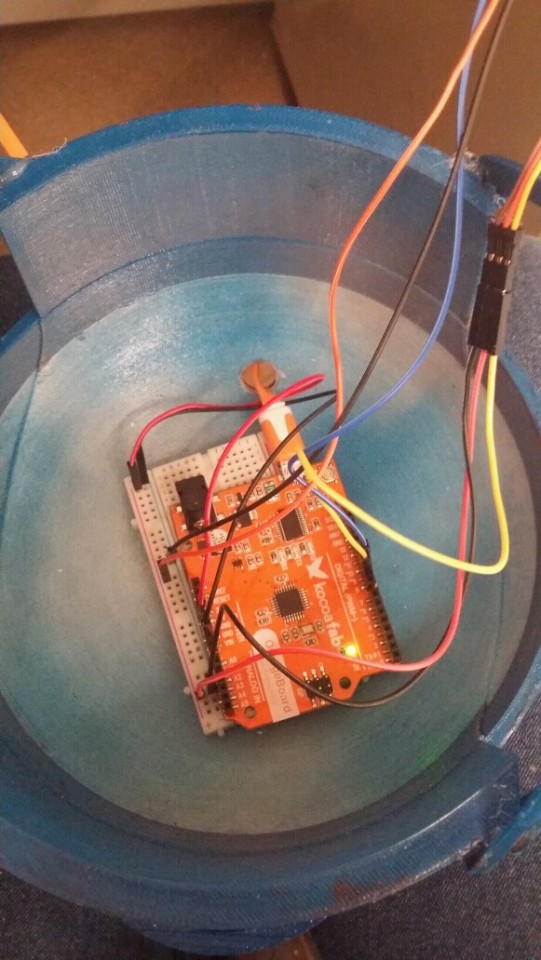
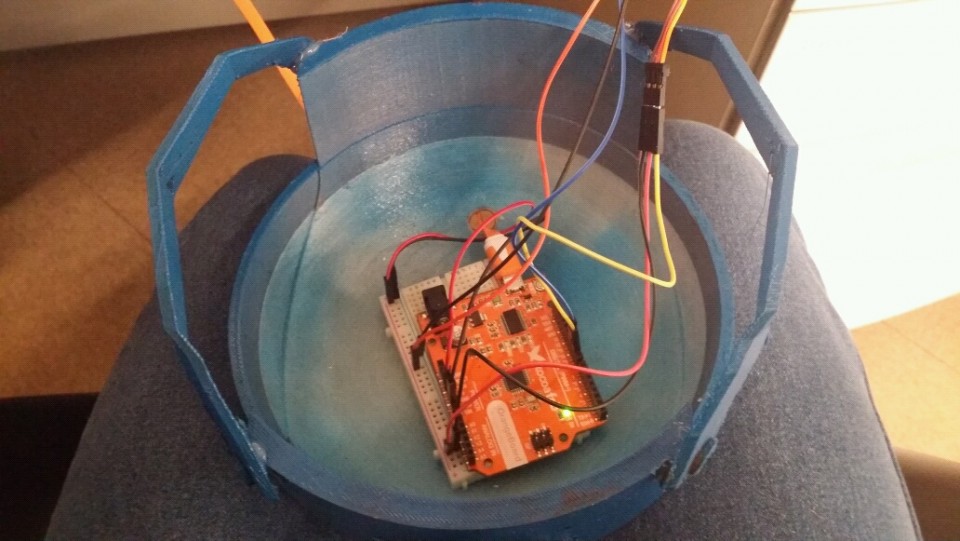
기구부 하기
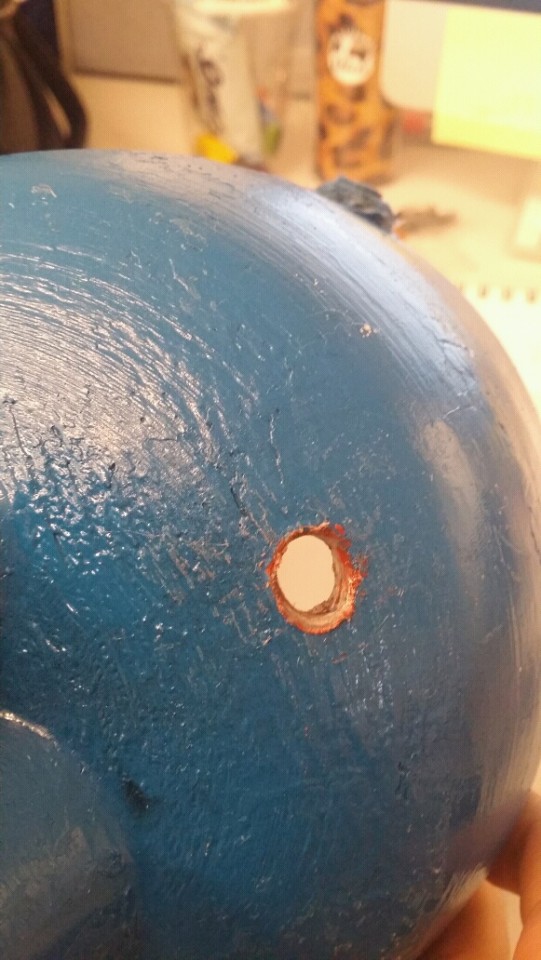
-하체
기구부라기보다는 작동할 수 있게 기구적?으로 보여드리겠습니다. ㅎㅎㅎ
우선 캐이블선이 들어가도록 구멍을 뚫었습니다. 민망한 부위라 미안해지네요
기본적인 실수를 해버렸네요 PLA같은 경우에는 글루건같이 낮은 온도의 열을 발생하는 것으로조 충분히 뚫으실수 있습니다.
당연 이러한 작업이 없어야 좋습니다 위헙하니까요~~^^



앞에 로고?는 라벨지에 출력해서 붙였습니다.
접착성이 있는것들은 너무 띄였다 붙였다하면 락카가 벗겨지더라구요 참고하세요
-눈꺼풀
서부모터의 캡이 너무 짧아서 미니언의 크기에 맞게 늘려줬습니다.
5CM 정도면 되구요 끝에 철사를 끠워줍니다.
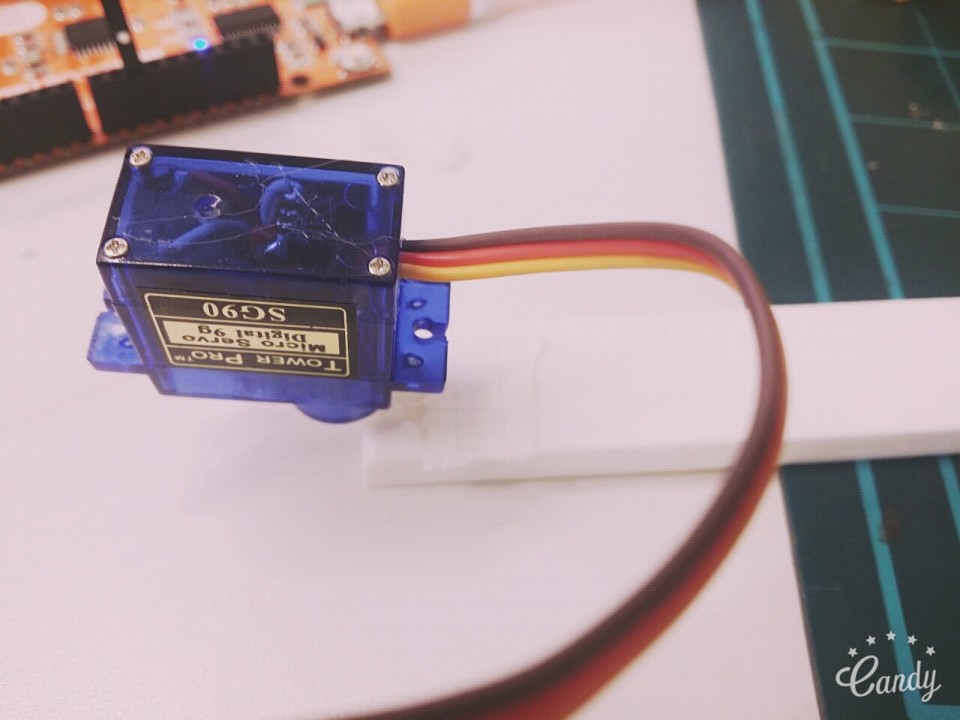
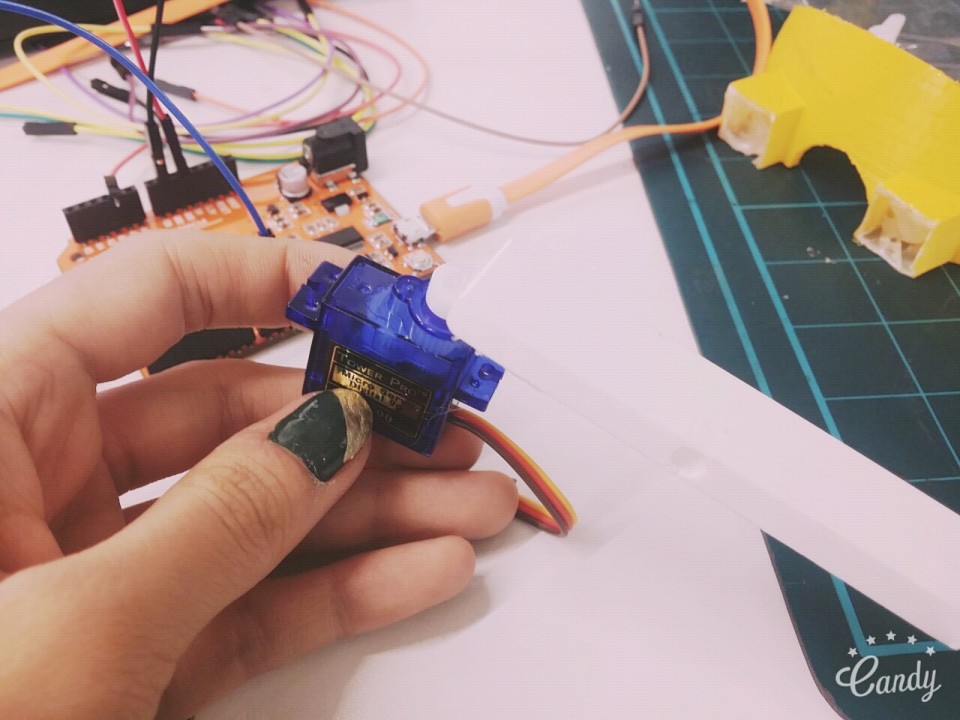
잘 구부러지는 철사 2개를 꼬아주세요 그래야 너무 잘 구부러지지않으면서 텐션만 주는 단단함을 구현할 수 있습니다.




서보모터는 중간이 아닌 1/3지점쯤에 붙여주시면 됩니다.
이때 철사를 늘링 캡에 끼우실때 캡과 철사 부분이 움직일떄 철사가 돌아가야합니다
널널하더라도 빠지지만 않으면 됩니다.
안쪽으로 구를 그리듯 여유롭게 철사를 조절해주세요
철사를 어느 정도의 길이로 하는지에 따라 코딩 각도는 변합니다.
찹고 하시고 진행하세요

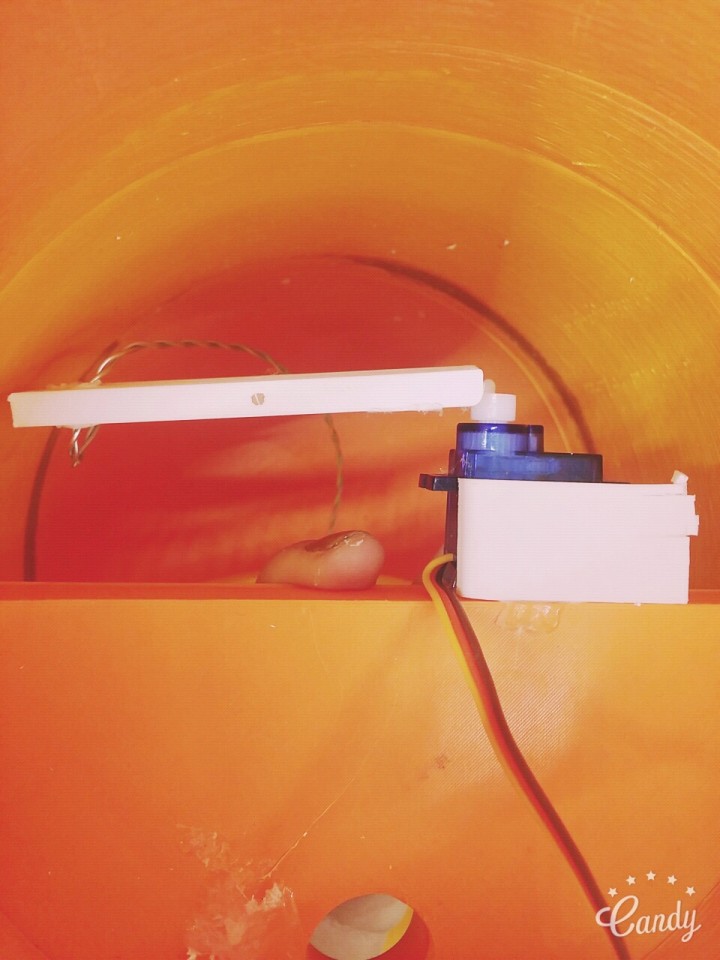
-눈알
눈알을 돌리는 부분입니다.
제가 고르는 서보모터마다 고장난 모터여서 띄였다 붙였다하다가 저렇게....
테스트를 해보시고 하시기바랍니다
이 밑부분이 중요합니다
저 막대기가 눈알과 이어지는 부분입니다.
막대사탕같은 구조이죠 잘못붙이시면 눈알이 앞으로 쏠려 눈커풀과 부딪히는 경우가생깁니다.

구동해보기위해 고글을 씌웠습니다.
눈이 움직이다보니 고글에 걸리면 안되기때문에 테스트하실때 살짝 붙이고 하시면 될것같아요

완성



카툰효과 사진도 함께~~

모델링은 모두 하실 수 있게 조립식으로 만들었습니다.
크기도 마음대로 변경하실 수 있습니다.
움직이지 않아도 된다면 손바닥만해도 되겠죠???

STL 파일 다운





염소할배
 minions, 3d print, servo, 염소할배
minions, 3d print, servo, 염소할배
